|
Jay Karhade Generalizing Perception for Robotics Hello! I'm a 2nd year PhD student at the Robotics Institute at Carnegie Mellon University, where I'm co-advised by Sebastian Scherer and Deva Ramanan. I am also currently interning at Field-AI. My goal is to build physical 4D models for general-purpose robots in real world environments. In this pursuit, my work often lies at the intersection of Computer Vision, Robotics and Graphics. In between my Masters and PhD, I spent a lovely summer in San Francisco interning at WorldLabs. Even before, I was a carefree undergrad at BITS Hyderabad. Email / Google Scholar / Twitter / Github |

|
Recent News
|
Research |
|
Any4D: Unified Feed-Forward Metric 4D Reconstruction
Jay Karhade, Nikhil Keetha, Yuchen Zhang, Tanisha Gupta, Akash Sharma, Sebastian Scherer and Deva Ramanan CVPR 2026 project page / Twitter Thread / Paper / Code Unified Feed-Forward Metric 4D Reconstruction! |

|
UFM: A Simple Path towards Unified Dense Correspondence with Flow
Yuchen Zhang, Nikhil Keetha, Chenwei Lyu, Bhuvan Jhamb, Yutian Chen, Yuheng Qiu, Jay Karhade, Shreyas Jha, Yaoyu Hu, Deva Ramanan, Sebastian Scherer and Wenshan Wang NeurIPS 2025 project page / Code / Paper Simple Scalable Transformer for Dense 2D Correspondence! |
|
Towards Understanding Camera Motions in Any Video
Zhiqiu Lin, Siyuan Cen, Daniel Jiang, Jay Karhade, Hewei Wang, Chancharik Mitra, Yu Tong Tiffany Ling, Yuhan Huang, Sifan Liu, Mingyu Chen, Rushikesh Zawar, Xue Bai, Yilun Du, Chuang Gan and Deva Ramanan NeurIPS 2025 (Spotlight) project page / Dataset / Paper Are LMMs good at camera motion understanding? (Hint: Not Quite!) |
|
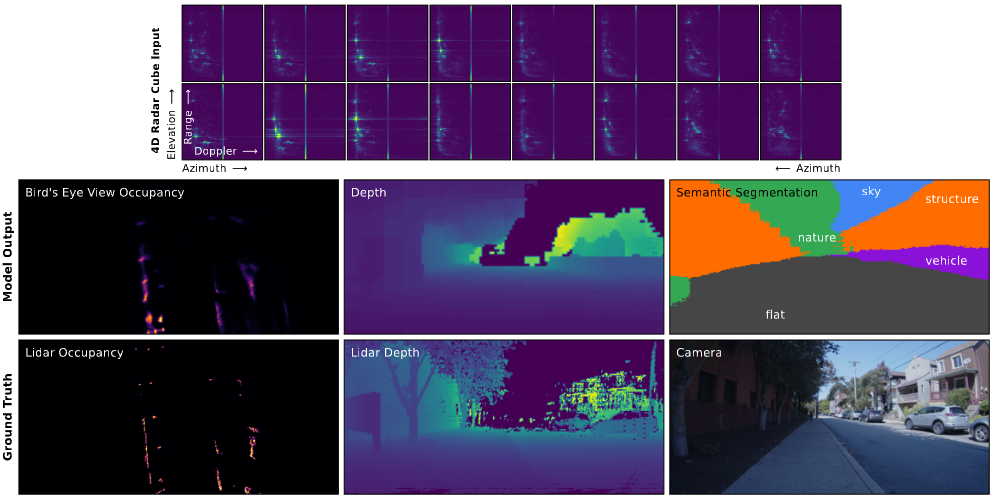
Towards Foundational Models for Single-Chip Radar
Tianshu Huang, Akarsh Prabhakara, Chuhan Chen, Sebastian Scherer, Jay Karhade, Deva Ramanan, Matthew Toole and Anthony Rowe ICCV 2025 (Oral Presentation) — Top 0.57% project page / video / Paper Large Dataset + Foundation Models for RADAR |
|
SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM
Nikhil Keetha, Jay Karhade, Krishna Murthy Jatavallabhulah, Gengshan Yang, Sebastian Scherer, Deva Ramanan and Jonathon Luiten CVPR 2024 project page / video / Paper Gaussian Splatting Meets Dense SLAM! |
|
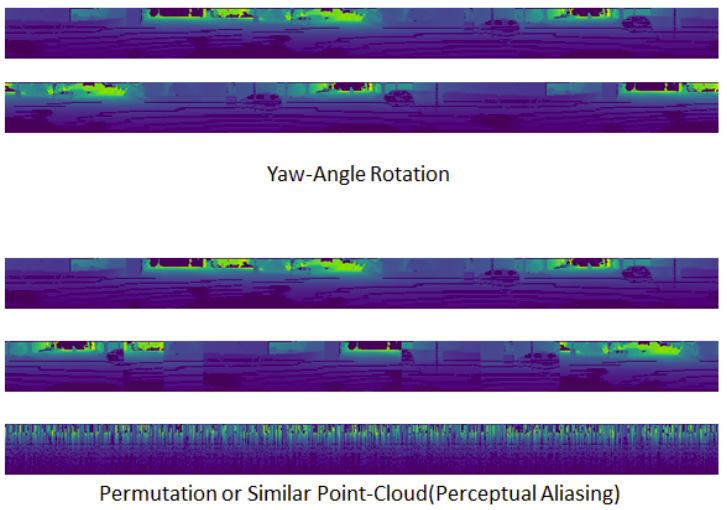
Robust Lidar Place Recognition with RoPE enhanced OverlapTransformer
Jay Karhade, Sebastian Scherer Last-Mile Delivery Workshop, IROS, 2023 Short Paper Modifying OverlapTransformer and adding Rotary Positional Embeddings to make Lidar Place Recognition robust under geometric aliasing. |
|
AnyLoc: Towards universal Place Recognition
Nikhil Keetha*, Avneesh Mishra*, Jay Karhade*, Krishna Murthy Jatavallabhulah, Sebastian Scherer, K. Madhava Krishna, Sourav Garg, RAL, 2023, ICRA 2024 project page / video / Paper Combining self-supervised foundation model features from DINOv2 with unsupervised aggregation techniques to achieve zero-shot 400% improvement on Visual Place Recognition and emergence of semantic domains. |
|
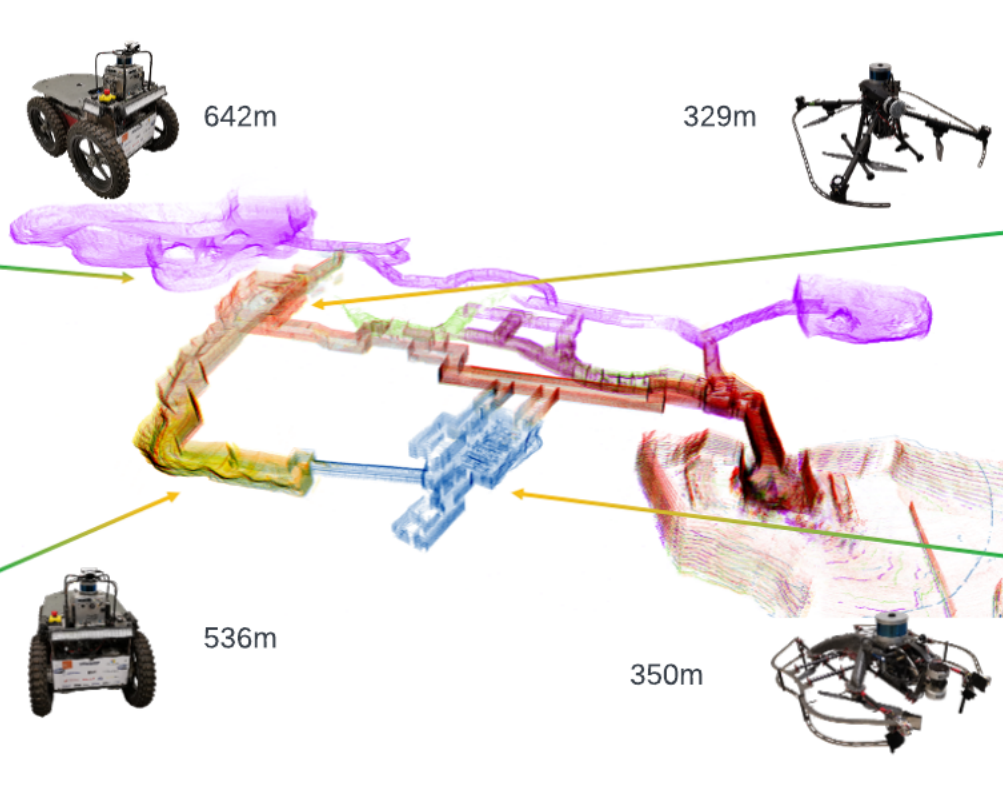
SubT-MRS: A Subterranean, Multi-Robot, Multi-Spectral and Multi-Degraded Dataset for Robust SLAM
CVPR 2024 Paper Sub-T and Multi-Robot Dataset for SLAM applications. Currently part of ICCV 2023 Challenge. |
|
Time–frequency-domain deep learning framework for the automated detection of heart valve disorders using PCG signals.
Jay Karhade*, Shashwati Dash, Samit Kumar Ghosh, Dinesh Kumar Dash and Rajesh Kumar Tripathy IEEE Transactions on Instrumentation and Measurement, 2022 Paper Extract deep features time-domain and frequency-domain polynomial chirplet transform for automated detection of heart-valve disorders. |
|
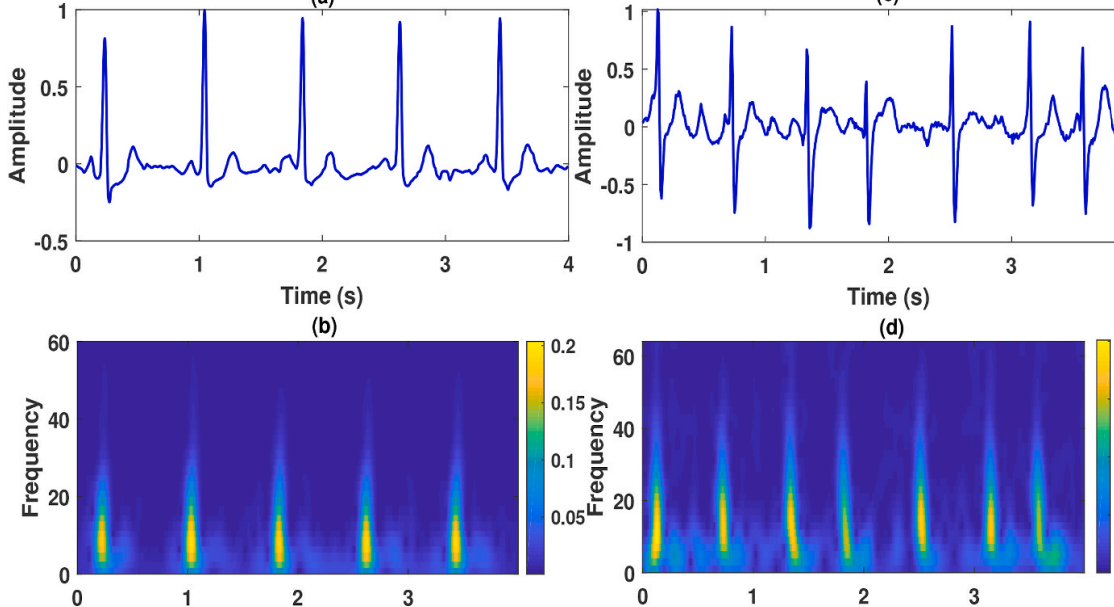
AFCNNet: Automated detection of AF using chirplet transform and deep convolutional bidirectional long short term memory network with ECG signals
Tejas Radhakrishnan*,Jay Karhade*, Samit Kumar Ghosh, Priya Ranjan Muduli, RK Tripathy, U Rajendra Acharya Computers in Biology and Medicine, 2021 Paper Extract deep features time-domain and frequency-domain polynomial chirplet transform for automated detection of heart-valve disorders. |
|
Last updated on Jan 18th 2026. Website Template taken from Jon barron. |